L’esplorazione robotica di Marte è al centro delle recenti missioni internazionali e anche nei laboratori di Leonardo si studiano sistemi robotici all’avanguardia per contribuire alla scoperta dei segreti del Pianeta Rosso. Nell’ambito della campagna “Mars Sample Return” della NASA, in collaborazione con l’Agenzia Spaziale Europea (ESA), Leonardo ha siglato un contratto con Airbus per la fase di studio avanzata (Advanced B2) del braccio robotico del Sample Fetch Rover (SFR) dell’ESA e ha ottenuto dall’ESA il finanziamento per proseguire lo studio del Sample Transfer Arm (STA) per il lander della NASA.
Leonardo, anche grazie all’importante contributo dell’Agenzia Spaziale Italiana, è quindi coinvolta nello studio di due elementi della missione 2026 della campagna Mars Sample Return, il braccio del rover e quello del lander. Per entrambi, Leonardo è ora impegnata a progettare i rispettivi sistemi robotici di acquisizione e manipolazione dei campioni.
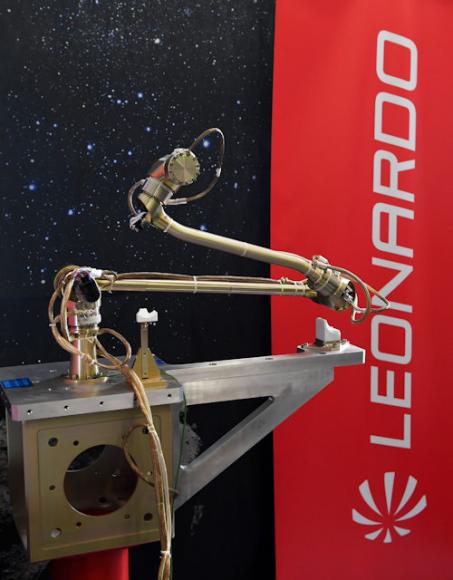
Il braccio robotico del rover SFR, il cui consorzio industriale è guidato da Airbus UK, dopo una fase iniziale di studio e testing, entra ora nella fase avanzata di progettazione e sviluppo del primo prototipo (breadboard) per dimostrare le elevate capacità del sistema. Si tratterà di un braccio a 6 gradi di libertà estendibile fino a circa 110 cm e di un gripper, ovvero una pinza, con tanto di sistema di controllo. L’STA del lander NASA è invece un braccio più complesso, con 7 gradi di libertà che supera i 200 cm di estensione e entra ora nella fase di sviluppo del breadboard. In questo caso, Leonardo è responsabile di un consorzio industriale internazionale incaricato anche della progettazione dell’elettronica di controllo, del software e del sistema di visione.
Entrambi i bracci si basano sull’esperienza maturata nella realizzazione dei modelli DELIAN e DEXARM, sviluppati da Leonardo, tuttora considerati standard di riferimento nel mercato spaziale europeo. L’azienda vanta inoltre una forte conoscenza nel settore delle trivelle spaziali, progettate per missioni quali Rosetta, ExoMars e Luna-27.
Per MSR, Leonardo contribuirà anche all'Earth Return Orbiter (ERO) attraverso Thales Alenia Space (joint venture tra Thales 67% e Leonardo 33%) che sarà responsabile della fornitura del sistema di comunicazione che consentirà la trasmissione dei dati tra Terra, ERO e Marte. Progetterà inoltre l’Orbit Insertion Module e gestirà la fase di Assembly Integration and Test (AIT) per il modello Proto-Flight della sonda ERO.
Mars Sample Return (MSR)
La campagna MSR dell’ESA e NASA comprende tre missioni che saranno lanciate a partire dal 2020. Queste missioni funzioneranno insieme per raggiungere l'ambizioso obiettivo di portare sulla Terra campioni del suolo di Marte nel 2031.
La prima missione “Mars2020” della NASA, lanciata lo scorso luglio, vedrà il rover Perseverance scavare e raccogliere materiale del suolo marziano. Perseverance sigillerà i campioni di roccia e suolo in appositi contenitori e li rilascerà sul terreno in posizioni strategiche in attesa della missione successiva.
Con partenza prevista nel 2026, il “Sample Retrieval Lander” è la seconda missione di MSR. Questa missione è a sua volta composta da tre elementi: il lander della NASA, il Sample Fetch Rover dell’ESA, e il Mars Ascent Vehicle (MAV). Leonardo è coinvolta nello studio dei bracci per il lander NASA e il rover dell’ESA che avranno caratteristiche e compiti diversi tra loro. Il rover, con l’aiuto del braccio robotico, cercherà e raccoglierà i campioni sul suolo e li porterà al lander NASA. Il lander NASA con il suo braccio ESA trasferirà i campioni al MAV che li lancerà nell’orbita marziana.
Infine, la terza missione “Earth Return Orbiter” (ERO) sarà programmata in relazione al suo compito di raccogliere “al volo” il contenitore con i campioni nell’orbita di Marte e portarli sulla Terra. Leonardo, attraverso Thales Alenia Space, fornirà elementi cruciali dell'orbiter. Atterraggio previsto nell’Utah (USA).










